
2020年4月26日
自律走行車の安全性を実走行の前に確立する
CarSim および TruckSim、BikeSim によって使われるデータには、サスペンションの動作、パワートレインのプロパティ、アクティブ コントローラーの動作、タイヤのプロパティ、道路の傾斜、障害物、天候の条件、アスファルトのタイプなどが記述されています。これらのソフトウェアの中心となるものは、車両がどのように反応するか予測することができるシミュレーション ソルバーです。たとえば、特定の条件下で、あるいは濡れた路面で、急ブレーキをかけたときに車両が転倒したり横滑りするかどうかなどを予測します。さらに、このソフトウェアには、解析済みデータから車両の動きを視覚的に表現できる機能も備わっています。
 一方でこのソフトウェアは、現実の車両と地図のデータをインポートすることによって、スピードや反応時間、その他の運転経験の特性についての分析も可能です。事故の再現やトレーニング シミュレーターとしての使用ももちろん考えられますが、近年新たな利用方法が注目されるようになってきました。それは、自律走行車に関するデータ収集と機械学習のための用途です。
一方でこのソフトウェアは、現実の車両と地図のデータをインポートすることによって、スピードや反応時間、その他の運転経験の特性についての分析も可能です。事故の再現やトレーニング シミュレーターとしての使用ももちろん考えられますが、近年新たな利用方法が注目されるようになってきました。それは、自律走行車に関するデータ収集と機械学習のための用途です。
自律走行車をテストする
限られた運転状況であれば、自動運転車はすでに一般の利用に供されていますが、より複雑な運転環境において実用化されるためには、安全性と規則の要件を満たすべく、そこに投入されているテクノロジーの整備が必要となります。そのプロセスの一環として、試走中における車両のデータを記録および分析するという作業があります。自律走行車は、カメラ、レーダー、LIDAR といった物理学に基づくさまざまなセンサーを利用することによって、まわりの環境を感知します。自動走行車の成功は、かなりの部分、これらセンサーからのデータを処理して、他のものとの距離を判断できるようになることにかかっています。たとえば、他の車や歩行者、自転車、さらには道路に放置されているゴミとの距離を判断し、もちろん、道路自体の傾斜、サイズ、コンディションも判断できるようにならなければなりません。また、あらゆる天候条件、あらゆるライト条件において、人間のドライバーのように車線区分線や信号、交通標識を感知して反応できる必要があります。
このような自動車による最初のテストは、実際の物理的なテストコースで行われていました。しかし間もなく、まずバーチャル自動車を使ってテストしたほうが、より効率的で安全であることが明白となったのです。
 バーチャル自動車には、現実の物理的な自動車のセンサーがすべて搭載されます。また、視覚的なデータは、物理的なテストと同じようにセンサーに供給されます。バーチャルのテストと物理的なテストとの違いは、エンジニアがセンサーの配置位置をいろいろと試してみることが簡単にできること、さらには、障害物や天候、時刻、道路のコンディションをさまざまに変えて素早くイテレートできることにあります。しかも、これらはすべてバーチャルな環境という安全地帯から行うことができるのです。
バーチャル自動車には、現実の物理的な自動車のセンサーがすべて搭載されます。また、視覚的なデータは、物理的なテストと同じようにセンサーに供給されます。バーチャルのテストと物理的なテストとの違いは、エンジニアがセンサーの配置位置をいろいろと試してみることが簡単にできること、さらには、障害物や天候、時刻、道路のコンディションをさまざまに変えて素早くイテレートできることにあります。しかも、これらはすべてバーチャルな環境という安全地帯から行うことができるのです。
Unreal Engine に組み込む
バーチャルでも現実でも、自律走行車のテストには数百時間、数千時間の運転が必要となります。そして、このようなテストでは莫大な量のデータが生成されます。 Mechanical Simulation 社は、そのような傾向をすでに数年前から察知し、この難題に対応すべく製品のアップグレードに取り掛かりました。「最初にやるべきことは、私たちのドライビング シミュレーターの製品に含まれている現実世界の交通と道路のモデルを改善することでした」と Robert McGinnis 氏 (Mechanical Simulation 社の上級営業マネージャー) は言います。「しかし、その後自律走行車が登場し、物理学ベースのセンサーを組み入れたいという要望があがりました。そのため、私たちのテクノロジーは、車両力学および自律走行を扱うエンジニアのための汎用的な自動車シミュレーション ツールとして提示されることになりました。」
同時に Mechanical Simulation 社は、同社のソフトウェアの視覚的表現のために、コンピュータ グラフィックスにおける進歩と歩調を合わせる必要があると気がつきました。
 Mechanical Simulation は、多くの顧客が、視覚化のためのオプションを増やすために、CarSim および TruckSim のソルバーによる結果を、自分たちのモデルと環境をともなって Unreal Engine に移植し始めていることに気がつきました。UE4 には、簡単に利用できるソースコード、C++ のサポート、ブループリント というビジュアル スクリプティング システムが備わっているため、ドライビング テストによって生じる大量のデータを処理するには UE4 が魅力的な選択肢になっていたのです。
Mechanical Simulation は、多くの顧客が、視覚化のためのオプションを増やすために、CarSim および TruckSim のソルバーによる結果を、自分たちのモデルと環境をともなって Unreal Engine に移植し始めていることに気がつきました。UE4 には、簡単に利用できるソースコード、C++ のサポート、ブループリント というビジュアル スクリプティング システムが備わっているため、ドライビング テストによって生じる大量のデータを処理するには UE4 が魅力的な選択肢になっていたのです。そのような状況の中、Mechanical Simulation 社は、同社の製品をより一層 Unreal Engine に組み入れることを決断します。「道路とセンサー、さらには MATLAB/Simulink といったインターフェイス ツールからデータを取得して、ユーザーが自身のアクティブ制御機構を組み入れることが可能なのは明白でした。」 (McGinnis 氏)
このとき、Unreal Engine を使って Mechanical Simulation の製品群をアップグレードする方針が明確になりました。しかも、そのことによって、核となるテクノロジー、すなわち製品内のソルバーに力を注ぐ余裕が得られました。「初期の頃は、視覚化のために複雑なシーンを作成する有効な手段がありませんでした。そこで私たちが取ったアプローチは、CarSim の自動車ソルバーが Unreal Engine に読み込まれることを可能にするプラグインを Unreal Marketplace に追加するというものでした。このツールを使って、ユーザーは独力でシーンとシナリオを作成することが可能になったのです。」(McGinnis 氏) />
VehicleSim Dynamics プラグイン は、2017年に Unreal Marketplace で無料でリリースされました。これにより、CarSim および TruckSim のユーザーは強力なツールを得たことになります。つまり、物理ベース レンダリング (PBR) のマテリアルやリアルなライティング、ランドスケープとフォーリッジのパック、都市景観のアイテムといった Unreal Engine が提供するすべての利点を生かしたビジュアル表現が可能になるのですから。
プラグインはどのように機能するのか
VehicleSim Dynamics プラグインは、ソルバーのデータをブループリントに変換することによって機能します。この変換されたデータは簡単に照会されることができ、それにより地形と車両に関するデータが生成されます。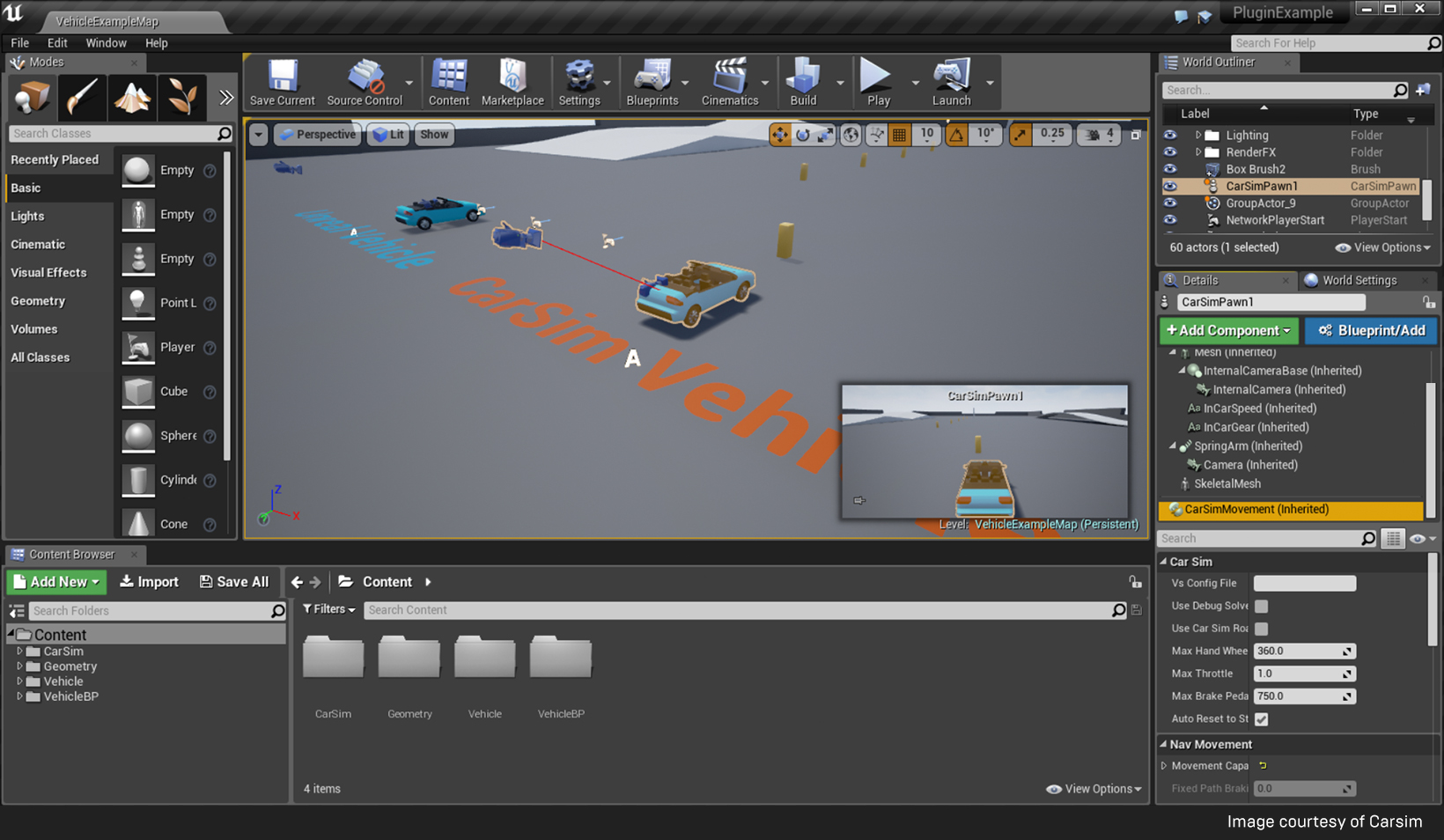 ソルバーは、地形のデータを Unreal Engine でできるだけ使いやすくするために、地形の記述を検索可能な構造に組み換えます。それによって、ソルバーは効率的にその情報を照会できるようになります。また、低性能のコンピュータを使う顧客に配慮して、このプラグインは、地形のグラフィカルな表現と物理表現を別々に扱います。
ソルバーは、地形のデータを Unreal Engine でできるだけ使いやすくするために、地形の記述を検索可能な構造に組み換えます。それによって、ソルバーは効率的にその情報を照会できるようになります。また、低性能のコンピュータを使う顧客に配慮して、このプラグインは、地形のグラフィカルな表現と物理表現を別々に扱います。「シミュレーションの物理表現とビジュアル表現を完全に分けることによって、ソルバーを別個のコンピュータで実行させることができます。そうしておいてから Unreal に戻る通信チャンネルを確立することによって、車両はビジュアル的に表現されることになります」と Jeremy M. Miller 氏 (Mechanical Simulation 社のリード デベロッパー) は説明します。「少々複雑なのですが、GPU を一切持ち合わせていない HIL [hardware-in-the-loop] のシステムに接続するためには必要なことなのです。」
 Mechanical Simulation 社のチームは、Unreal Engine のためのプラグインが簡素化されているため、顧客にはものすごくプラスになっていると考えています。「20 万ドル相当のソフトウェアを単一のコンピュータ上で動作させるために、専属のエンジニアを配置し、更にそのエンジニアを補助するためだけにもう一人のエンジニアを配置しなければならないとしたら、誰もそのようなものは望まないでしょう。最高度に簡素されたツールチェーンこそ、最高度の効率を生み出すと自信をもって言えます。」(Miller 氏)
Mechanical Simulation 社のチームは、Unreal Engine のためのプラグインが簡素化されているため、顧客にはものすごくプラスになっていると考えています。「20 万ドル相当のソフトウェアを単一のコンピュータ上で動作させるために、専属のエンジニアを配置し、更にそのエンジニアを補助するためだけにもう一人のエンジニアを配置しなければならないとしたら、誰もそのようなものは望まないでしょう。最高度に簡素されたツールチェーンこそ、最高度の効率を生み出すと自信をもって言えます。」(Miller 氏)このプラグインは、トレーニングやテスト、新たに設計された車両のプリビジュアライゼーションにも役立つことが明らかになっています。チームは、プラグインが一層顧客の役に立つように常に心掛けています。最近の例では、FBX コンバーターを追加することによって、プラグインで扱える物理的な地形モデルを取り入れられるようにしています。
プラグインは現場でどのように利用されているのか
車両デザインのより美的な側面に従事している顧客は、Unreal Engine を利用することによってこれまで付加的な利益を得てきました。「Unreal Engine でイテレートすることによってさまざまなテーマについて研究している顧客もいます。たとえば、ヘッドライトのデザインといったテーマや、さまざまな車両でセンサーの配置を変更することによってセンサーのカバーする範囲を最適化するといった課題に極めて低いコストで取り組んでいるのです。」 (McGinnis 氏)そのような顧客には、バーテックスを挙げることができます。バーテックス社は、東京に本拠を置き、自動運転システムのための AI テクノロジーを開発しています。自律走行車のテストを支援するために、バーテックス社は AUTOCity.
と呼ばれるバーチャル タウンをスクラッチで開発しました。
「Carsim からの挙動制御情報によって、バーチャルタウン AUTOCity 上では極めてフォトリアリスティックな UE4 レンダリング映像が得られます」と述べるのは尾小山良哉氏 (バーテックス社 CEO) です。「UE4の技術を利用すると、AI 学習にとって不可欠な Depth 情報と Segmentation 画像が同時に生成できます。更には、AUTOCity 上のアセットにバーチャルの点群データを生成することによって、LiDAR のシミュレーションも同時に行うことが可能になります。これらの並列シミュレーションは、既に、汎用レベルの PC においてリアルタイムで実現しています。」
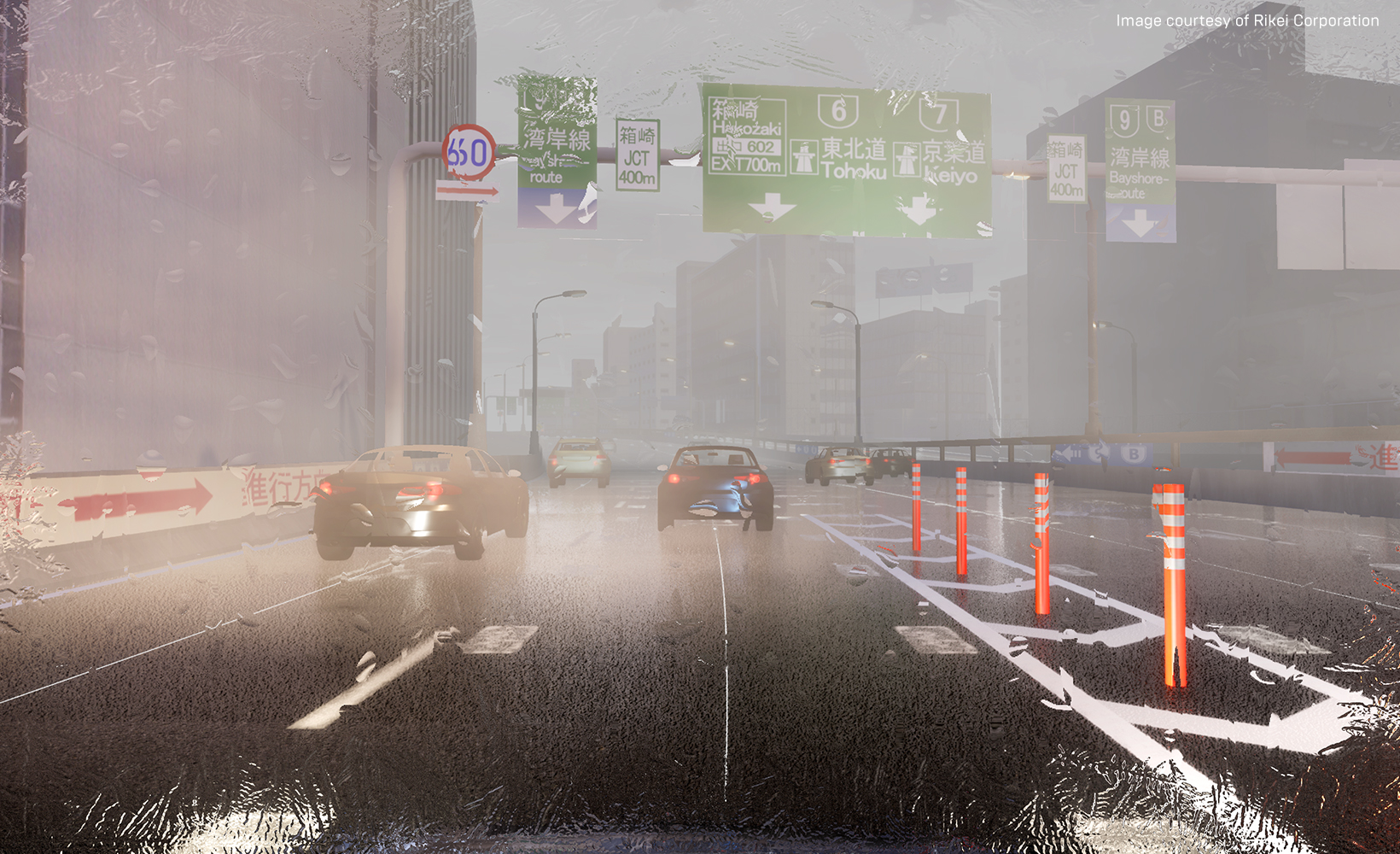
日本の株式会社 理経も、CarSim の UE4 プラグインを利用することによって自社の製品を強化しています。理経は、車両シミュレーションを含むさまざまな分野を対象に、フォトリアルな仮想空間を開発している会社です。
「UE4 は光の再現性が非常に高いため、現実世界に限りなく近い環境を提供することができます」と述べるのは、田村貴紀氏 (理経 XR ソリューショングループ 担当グループ長) です。「路面の反射や雨による濡れた状態を表現することも可能になります。」
ジャホン クシノブ氏 (理経 XR ソリューショングループ シニアエンジニア) は、「天候や太陽の位置等の特定の環境が UE4 により再現可能となります。急角度の路面や滑り易さなど現実では危険な環境も作り出すことができます。更には、このようなテストを 24 時間 365 日実施することが可能となるのです」と述べています。
 自動車シミュレーション業界の必要性はこれからも高まっていきます。Mechanical Simulation 社のチームは、それに合わせて成長を続ける構えです。「私たちの目標は、顧客にシームレスなエクスペリエンスを提供することにあります」と Miller 氏は語ります。「テスト エンジニアであれば、まず、天気の良い日のシナリオで車両運転テストのためのスイートを実行することでしょう。そうしておいてから、そのテストに雨という条件を加えるわけです。更には、夜の雨を加えて条件をより複雑なものにしていくことでしょう。その場合、このエンジニアは、これらのシナリオをビジュアル的にどのように表現すべきか、などと考えを巡らす必要はないはずです。自動車の走行性能をだけを把握したいはずです。Unreal Engine には、このようなシナリオをビジュアル的に首尾よく作り出せる機能が備わっています。シミュレーションを行っている人間にとっても、車両に備わっているシミュレートされたセンサーにとっても、満足できるシナリオをもたらすことが可能なのです。」
自動車シミュレーション業界の必要性はこれからも高まっていきます。Mechanical Simulation 社のチームは、それに合わせて成長を続ける構えです。「私たちの目標は、顧客にシームレスなエクスペリエンスを提供することにあります」と Miller 氏は語ります。「テスト エンジニアであれば、まず、天気の良い日のシナリオで車両運転テストのためのスイートを実行することでしょう。そうしておいてから、そのテストに雨という条件を加えるわけです。更には、夜の雨を加えて条件をより複雑なものにしていくことでしょう。その場合、このエンジニアは、これらのシナリオをビジュアル的にどのように表現すべきか、などと考えを巡らす必要はないはずです。自動車の走行性能をだけを把握したいはずです。Unreal Engine には、このようなシナリオをビジュアル的に首尾よく作り出せる機能が備わっています。シミュレーションを行っている人間にとっても、車両に備わっているシミュレートされたセンサーにとっても、満足できるシナリオをもたらすことが可能なのです。」複雑なデータセットを処理して、リアルタイム シミュレートのためのアプリケーションに昇華することによって、人間も機械も訓練する ― Unreal Engine が得意とするところです。この分野で活動を開始するためには、 Unreal Engine をダウンロード しましょう。